This robo-roach and robo-bird make the perfect team

Suppose you could have a robot that could make around on insane territory for ground observation, then lift off for aeronautical reconnaissance. That would be a really adaptable little robot. Clearly there would be some viable concerns. For example, the wheels needed for ground travel may make the robot too substantial and awkward for flight. So what can be the best arrangement? Two robots that can work in coupled.
The University of California Berkeley’s VelociRoach is a robot made by a group of analysts at the college’s Biomimetic Millisystems Lab, which concentrates on building robots propelled by nature. As opposed to running on straight legs, it has a moving stride on six C-molded legs, which gives it a chance to go at an astoundingly high velocity. A form of the VelociRoach, the X2, broke the robot rate record for robots of its size, coming to speeds of up to 4.9 meters for each second.
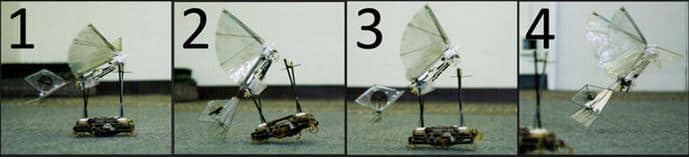
An alternate form of the VelociRoach has been changed to work as a team with one more of the lab’s robots, the flying creature motivated H2Bird ornithopter. The 32-gram roachbot was fitted with backings that empowers it to convey the 13.2-gram H2Bird ornithopter miniaturized scale flying vehicle, and can achieve rates of 2.7 meters for each second – more than sufficiently quick to give departure speed.
{kind=link}
The MAV can’t take off from a stationary position. Its wings, which do fold, are not sufficiently expansive to give enough push to counter its weight and the drag created by contact with the ground. It could be propelled by being tossed like a paper plane, which could give a superior take-off edge and enough speed for the MAV to proceed naturally.
To focus the best speed and pitch edge would be best to dispatch the MAV, the UC Berkeley group – graduate analysts Cameron Rose and Ron Fearing, and understudy Parsa Mahmoudieh – utilized a wind passage to gather information. This permitted them to assemble a custom apparatus to be fitted to the back of the VelociRoach, guiding the MAV’s nose noticeable all around.
Experimentation then confirmed that the base velocity at which the MAV will effectively dispatch is 1.2 meters for every second. Despite the fact that dispatch can fall flat at this velocity, it is normally created by uncalled for situating in the support, which can be shocked when the VelociRoach begins moving.
The group additionally found some fascinating reactions of conveying the MAV on the VelociRoach. The weight and greater part of the MAV builds the force utilization of the VelociRoACH by around 24.5 percent. Then again, the MAV settles the VelociRoach. The group observed that the pitch and moving speed is around 90 percent less when the MAV is in its support, and general speed is expanded by 12.7 percent when the MAV folds its wings while the insect runs.
Further experimentation on these impacts will be the following stride in the examination to attempt and make immaculate dispatch conditions with couple of disappointments as would be prudent.