MIT’s Hermes robot displays human-like reflexes
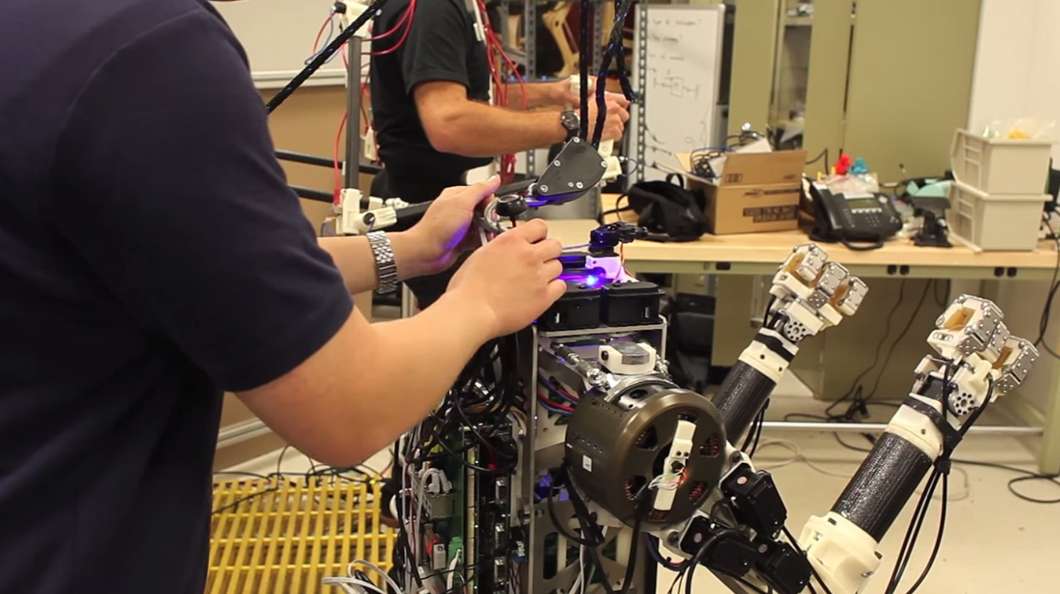
Research in the field of robotics is moving along at such a quick pace, to the point that it can be hard to detect the major breakthroughs of development in the innovation as they pass by. One huge stride forward is in proof at MIT as Hermes. Physically it’s all robot, yet its activities and reflexes are controlled by a person.
The robot sustains back data about its offset and situating continuously, so the human administrator has the capacity alter his or her feet and body in like manner. It addresses one of the major issues for humanoid robots – keeping upright on two feet. As it were, the reflexes of the robot to changing landscape or from a push in the back can be very nearly on a par with those of a human.
{kind=link}
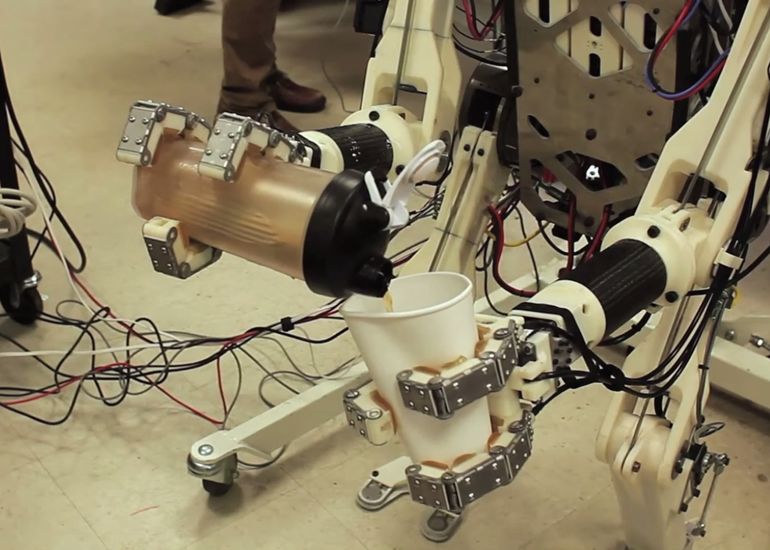
Likewise the hands of Hermes are three-fingered paws that can pick up tools, pulverize a pop can or even pour out an espresso. Utilizing joysticks fixed up to the principle exoskeleton, the human administrator has the capacity to lift objects and interface with the surroundings with more accuracy than a robot of this sort would for the most part have.
There are a lot of focal points to having a human administrator control a robot in the field, in light of the fact that the machine profits by a large number of years of mind development and the individual advantages from having the capacity to stay out of hurt’s way. The robot has the capacity specifically profit by a percentage of the things people can in any case improve, from keeping their offset to fixing a grasp on an article.
The last bit of the jigsaw is a couple of vision goggles that empower the human controller to see whatever is in front of Hermes. Whether attempting to explore through a progression of rooms or endeavoring to get an item from the floor, it gives the administrator a more noteworthy feeling of attention to the robot’s environment.
PhD understudies Joao Ramos and Albert Wang of the MIT Department of Mechanical Engineering are behind the task, and they inevitably conceive more automated knowledge being added to the outline.